Ti3 Al合金由于其密度低、比强度高和抗氧化性好等突出特点, 可作为航空发动机材料在650 ℃条件下长时工作, 或作为航天发动机材料在900 ℃条件下短时工作[1 ] . 但由于其室温塑性差, 断裂韧度低, 限制了其工程应用. 超塑成形是其有效成形方法之一. 20世纪90年代, 各国学者对其超塑性开展了大量的研究工作, 研究结果发现Ti3 Al合金具有非常好的超塑性, 如美国开发的普通α 2 合金Ti-24Al-11Nb (原子分数, %, 下同)和超α 2 合金(Super α 2 合金)Ti-25Al-10Nb-3V-1Mo[2 -5 ] . Dutta和Banerjee[6 ] 对Ti-24Al-11Nb合金不同相比例的超塑性研究发现, 获得最佳超塑性的α 2 /b 不是50∶50, 而是包含75%的α 2 相, 当在1020 ℃变形时, α 2 相体积分数增加到85%时, 所获得的延伸率也优于50∶50的. Yang等[2 ] 分别对Super α 2 合金和普通α 2 合金进行的超塑性研究发现, 对于Super α 2 合金, 长条α 2 晶粒在变形初始阶段发生破碎、球化, 随着应变增加, 晶粒长大; 高应变区与普通α 2 合金相同, α 2 晶粒含量很少, 然而, 2种合金之间的不同点是, Super α 2 合金中b 相体积分数增加会减少α 2 /b 相边界, 从而降低了晶界滑移的能力. 相反, 对于普通α 2 合金, b 晶粒是包围α 2 晶粒分布的, 这更有益于易扩散的、较软的b 相协调晶界滑移. Kim等[7 ] 通过透射电镜(TEM)研究了Ti-24Al-11Nb合金 的超塑性变形机理, 发现局部位错发生在α 2 /α 2 晶界和α 2 /b 相界处, 而α 2 晶粒内部很少有位错产生, 较软的b 相发生剧烈变形, 且位错主要堆积在晶粒三角区内, 认为晶界滑移是Ti3 Al合金超塑变形的主要机制.
与以上2种典型合金相比, Ti-23Al-17Nb (TAC-1B)由于添加更多的稳定b 相的合金元素Nb, 通过特殊热机械处理可使合金常规组织由α 2 +B2两相变为α 2 +B2+O三相, 具有更加优异的综合性能[1 ] , 本工作针对TAC-1B合金轧制板材超塑性开展研究, 为其工程应用奠定理论基础.
1 实验方法
实验材料是由钢铁研究总院提供的1 mm厚的退火态Ti-23Al-17Nb (TAC-1B)合金, 实测化学成分(质量分数, %)为: Al 12.50, Nb 31.87, O≤0.068, N≤0.01, H≤0.00043, Ti余量. 合金板材轧制的加热温度在α 2 +B2两相区的980 ℃, 采用每次加热间隔只进行一道次轧制, 轧制完成后在960 ℃进行退火.
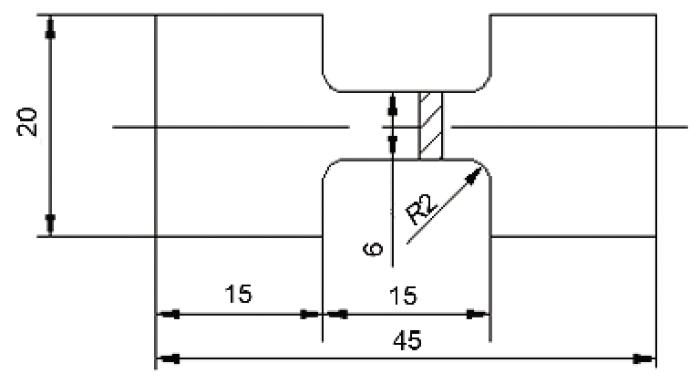
利用电火花线切割方法沿轧制方向(L向)加工拉伸试样, 其尺寸如图1所示, 标距为10 mm×6 mm×1 mm. 用SiC水磨砂纸对试样进行研磨, 确保试样标距范围内各表面无横向划痕. 变形温度为940~1000 ℃, 间隔20 ℃; 应变速率为1.7×10- 3 ~5.5×10- 5 s- 1 . 拉伸前试样表面涂Ti-1200玻璃防护润滑剂防止拉伸过程氧化, 待炉温达到实验设定的温度时装入拉伸试样, 到预定温度保温5 min后进行拉伸, 拉伸过程中采用微机控制保持应变速率恒定, 直至试样拉断为止. 将试样取出后立即水淬, 以保留高温变形组织. 超塑拉伸实验在SANS-CMT4104型微机控制电子万能实验机上进行, 均热带长度为300 mm, 横梁移动速度在0.1×10- 4 ~5.0×102 mm/min之间连续可调. 利用OLYMPUS BX41M金相显微镜(OM)和Quanta 250 FEG场发射环境扫描电子显微镜(SEM)进行显微组织观察分析.
图1 拉伸试样尺寸示意图
Fig.1 Schematic of dimensions of superplastic tensile specimen (unit: mm)
2 实验结果与讨论
2.1 超塑拉伸延伸率
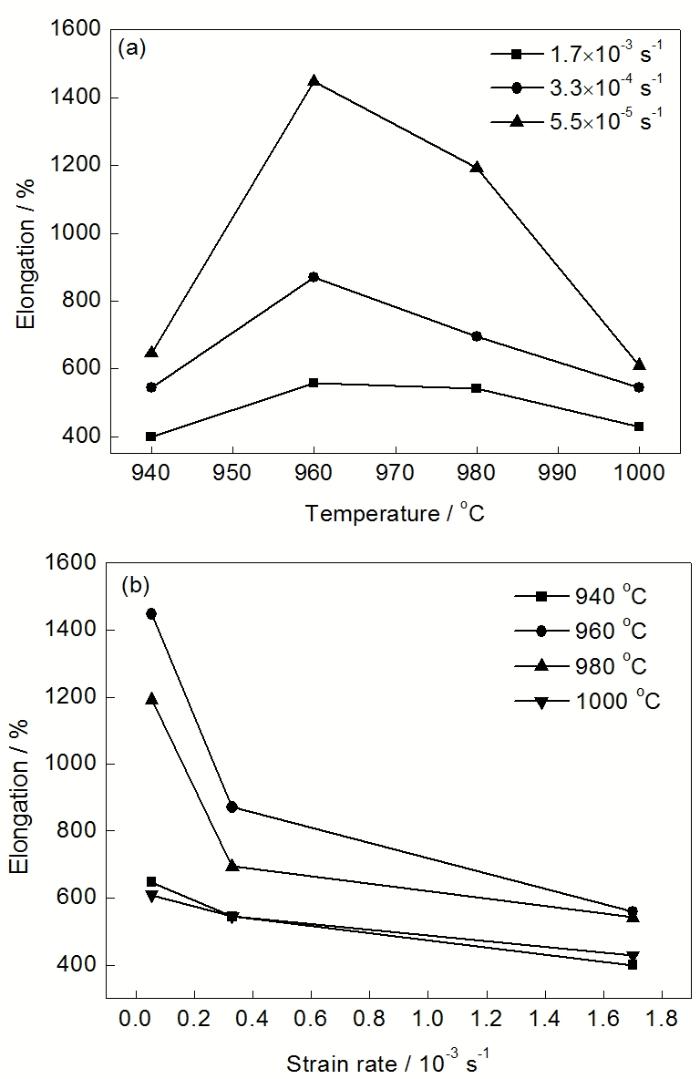
图2所示为TAC-1B合金在不同拉伸条件下的超塑拉伸结果. 如图2a所示, 在相同应变速率条件下, 延伸率随温度的升高先增加后减小, 呈抛物线形变化, 并且均在960 ℃时获得最高值. 随着应变速率的降低, 变形温度对延伸率的影响逐渐明显(图2b), 实验条件范围内, 在960 ℃, 5.5×10- 5 s- 1 时获得最高延伸率为1447.5%. 此结果与Super α 2 合金所获得的最高延伸率相当[2 -4 ] , 远高于普通α 2 合金(Ti-24Al-11Nb)所获的延伸率. Liauo等[8 ] 对Super α 2 合金的b 相有序/无序转变温度(TO-D )进行了研究, 发现其有序/无序转变温度为1100 ℃, 表明在1100 ℃以下变形时, b 相为有序结构, 即为B2相, 在超塑变形过程中b 晶粒的协调变形机制与α 2 相一致, 主要通过位错滑移和攀移来实现, 这表明b 相并非软相. 对于其它成分的Ti3 Al合金[9 -11 ] , 其TO- D 也均高于1100 ℃. Wu和Koo[12 ] 对织构与超塑性的关系研究认为, 有织构的超塑性优于无织构的, 是因为织构增加了位错可动性. 然而, 经过大变形后, 织构会通过晶界的滑移和晶粒的转动而消除, 不会对超塑性产生更多的影响. 而TAC-1B合金获得高延伸率的原因可能与Nb含量的增加有关, Nb元素为B2相稳定元素, B2相为具有较多可动滑移系的bcc结构而有助于合金塑性的改善, 其晶粒内特有的亚组织结构又是合金强化的有利因素, 从而使其超塑性变形能力有效提高.
图2 TAC-1B合金的超塑拉伸结果
Fig.2 Superplastic tensile results of TAC-1B alloy
2.2 应力-应变曲线
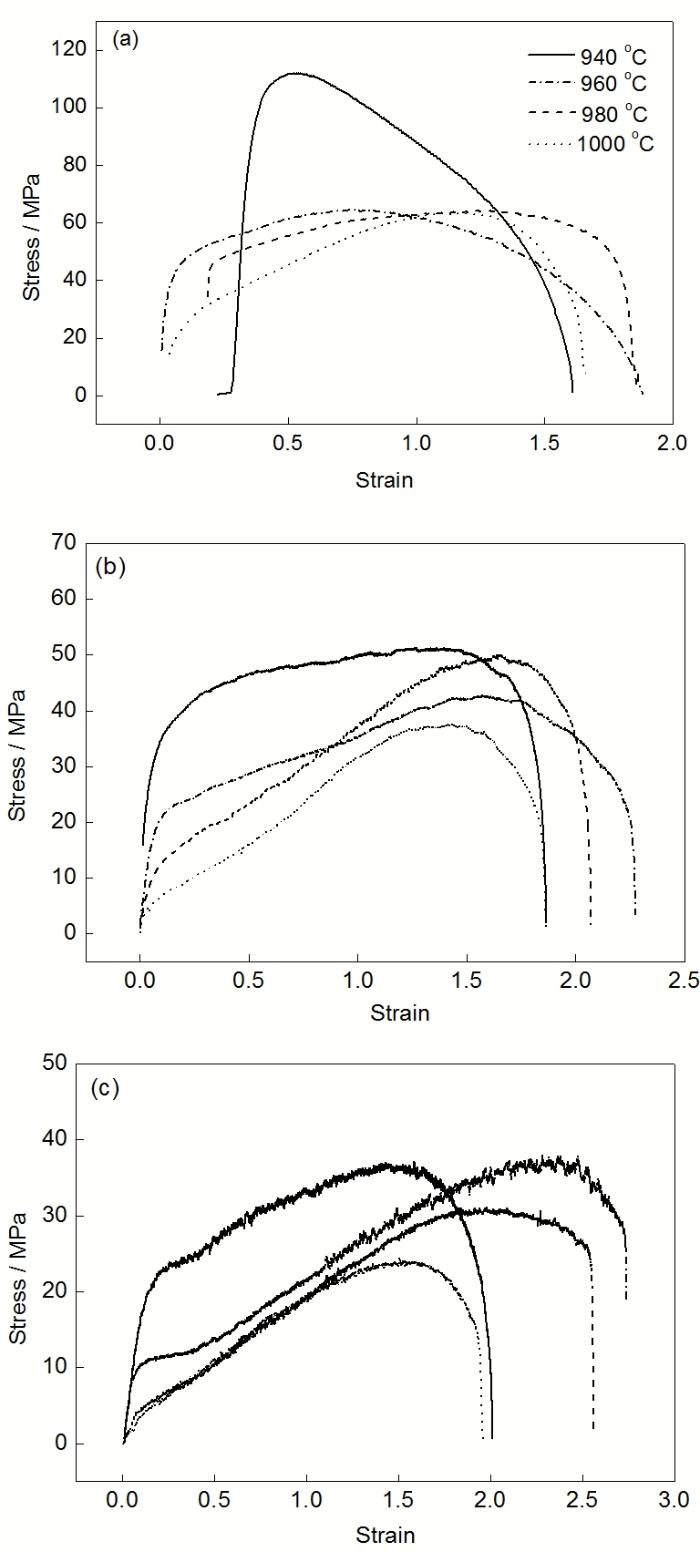
图3所示为不同应变速率和变形温度的应力-应变曲线. 其共同特征为流变应力随着应变的增加达到峰值应力后逐渐减小, 软化阶段应力减小迅速, 加工硬化和动态再结晶软化始终未出现平衡. 应变速率为1.7×10- 3 s- 1 时, 除940 ℃外, 其余3个温度的峰值应力几乎相同(图3a). 应变速率降低, 则峰值应力对应的应变(峰值应变)随着温度的升高先增加后减小. 应变速率为3.3×10- 4 s- 1 时, 加工硬化率随着温度的升高而逐渐增加(图3b). 应变速率减小至5.5×10- 5 s- 1 时, 不同温度的加工硬化率几乎相同(图3c). 这表明, 温度越高、应变速率越低, 动态硬化的效果越明显, 高于再结晶软化程度, 从而导致应力逐渐增加. 尤其是在应变速率为3.3×10- 4 和5.5×10- 5 s- 1 条件时, 变形一旦超过峰值应变时, 软化程度大于硬化程度后应力迅速下降, 直至试样发生断裂. 对于高应变速率的应力-应变曲线(图3a), Imayev等[4 ] 通过组织分析解释了应力-应变曲线, 认为强化阶段与缺陷的不断聚集和初始晶粒的长大有关, 缺陷的产生由晶界滑移造成, 而晶界滑移不仅是塑性变形机制, 也是组织的回复机制, 这是因为它对由晶界滑移产生的位错的吸收有贡献; 随着应变速率 ε ˙ σ 的迅速增加, 即使在最佳变形条件下, σ 也表现很高. 对于低应变速率的曲线, 图3b和c, 其硬化阶段远高于软化的, 由于B2相的变形机制主要通过位滑移和攀移来实现, 可能由于Nb含量的增加导致B2相的增加, 使动态再结晶只能抵消部分加工硬化, 从而导致应力在拉伸过程中大部分表现为增加.
图3 不同应变速率和变形温度的应力-应变曲线
Fig.3 Stress-strain curves at different temperatures and strain rates of 1.7×10- 3 s- 1 (a), 3.3×10- 4 s- 1 (b) and 5.5×10- 5 s- 1 (c)
2.3 微观组织演化
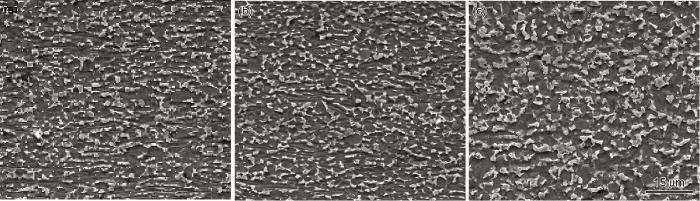
沿轧制方向(L向)、垂直轧制方向(T向)和轧制面(ST向)的微观组织如图4所示, 由α 2 (深色相)和B2(亮色相)两相组成. 沿L和T向的组织中α 2 晶粒均呈长条状, 而ST向由大小不一、近似等轴的α 2 晶粒组成, 属于典型的轧制组织, α 2 和B2两相的体积分数比约为60∶40.
图4 TAC-1B合金板材原始组织SEM像
Fig.4 SEM images of primary microstructures along longitudinal (L) (a), transverse (T) (b) and rolling (ST) (c) in TAC-1B alloy
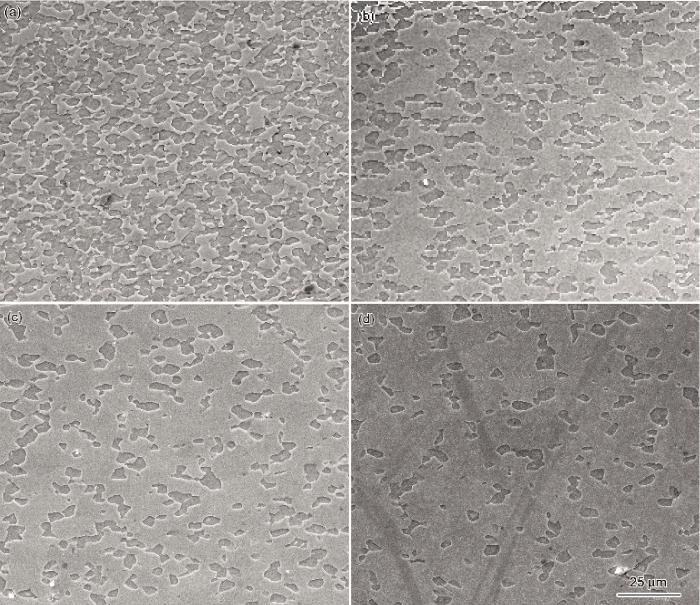
图5 应变速率为3.3×10- 4 s- 1 时不同温度下的纵截面微观组织
Fig.5 Longitude microstructures at constant strain rate 3.3×10- 4 s- 1 and different temperatures
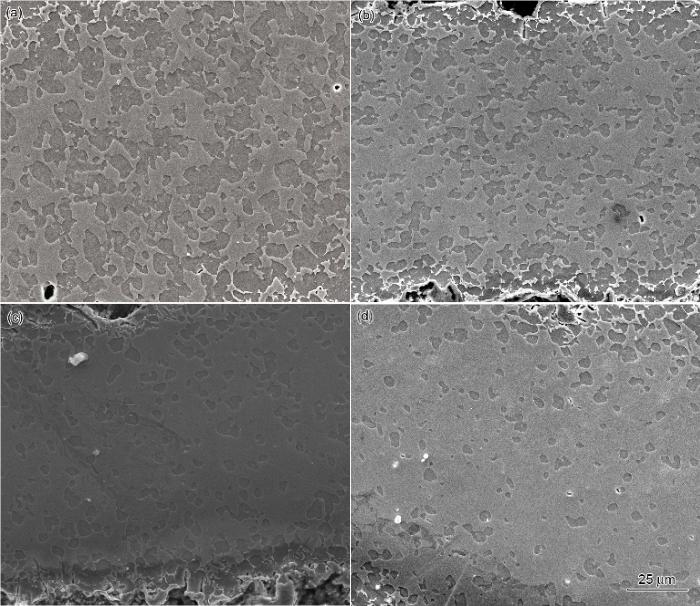
图5所示为应变速率为3.3×10- 4 s- 1 时试样纵截面微观组织随温度的变化. 对比L向的原始组织(图4a)可以发现, 原始组织中的纤维组织完全消失, 各条件下的α 2 晶粒均呈等轴状, 这表明超塑拉伸过程中长条状α 2 晶粒发生了拉长、断裂和球化, 进而获得更加适合超塑变形的等轴晶粒组织, 这可以充分发挥另外一种变形机制, 即晶粒转动. Ti3 Al基合金中的α 2 相在塑性变形中有3种可以开动的滑移系, 即基面的 0001 11 2 ̅ 0 1 1 ̅ 00 11 2 ̅ 0 11 2 ̅ 1 11 2 ̅ 6 α 2 相晶体向不同方向转动[13 ,14 ] . 图6所示为沿拉伸试样横截面观察的微观组织. 可见, 此截面的微观组织与纵截面的相同, 各条件下的α 2 晶粒也均呈等轴状, 这表明晶粒转动为TAC-1B合金的主变形机制之一. 还可以发现, 随着温度的升高, α 2 晶粒尺寸逐渐减小, 在960 ℃时平均晶粒尺寸为5 μm. 晶粒尺寸越小, 晶界越多, 而Ti3 Al合金的变形机制以晶界滑移机制为主. 因此, 细晶粒的晶界多, 滑移更加容易, 导致所获得的延伸率更高. 然而, 随着温度继续升高, α 2 晶粒尺寸并未增大, 980和1000 ℃的α 2 晶粒大小基本相当, 均约为4 μm, 3个温度的α 2 晶粒都小于940 ℃的(约15 μm). 这与Jobart等[15 ] 的结果恰好相反, 他发现随温度升高、应变增加, α 2 晶粒尺寸逐渐增大. 影响Ti3 Al合金超塑性的另外一个主要因素是相比例. 可见, 随着变形温度的升高, B2相含量逐渐增加, 与Fu等[5 ] 报道的一致.
图6 应变速率为3.3×10- 4 s- 1 时不同变形温度横截面微观组织
Fig.6 Transverse microstructures at constant strain rate 3.3×10- 4 s- 1 and different temperatures
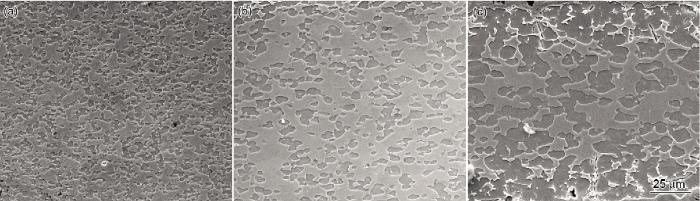
图7所示为960 ℃条件下不同应变速率的微观组织. 可见, 随着应变速率的降低, α 2 晶粒尺寸逐渐增大, 但其相含量先减少后增加, 在5.5×10- 5 s- 1 时α 2 相与B2相含量达到平衡, 为50∶50, 且呈弥散分布, 达到了最高延伸率. 可见, α 2 相比例高或低均对超塑性不利, α 2 相为50%较为适宜.
图7 960 ℃条件下不同应变速率的微观组织
Fig.7 Microstructures at 960 ℃ and different strain rates
2.4 TAC-1B合金的本构关系
采用以下双曲正弦形Arrhenius方程描述TAC-1B合金的本构关系[1 ] [6 -19 ] :
(1) ε ˙ = A s i n h α σ n e x p - Q / R T
(2) ε ˙ = A 1 σ n 1 e x p - Q / R T
(3) ε ˙ = A 2 e x p β σ e x p - Q / R T
(4) Z = ε ˙ e x p Q / R T
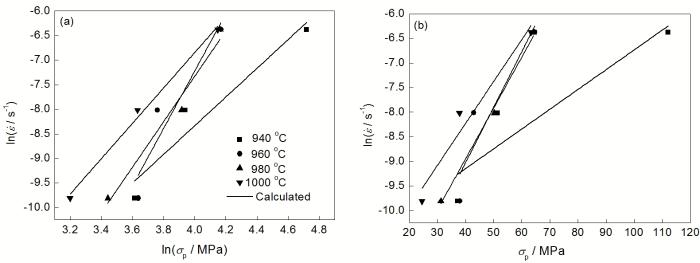
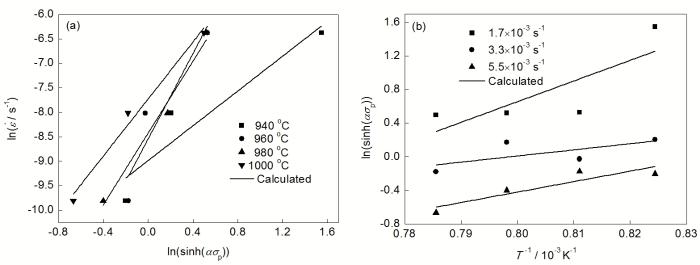
式中, σ 为流变应力, MPa; ε ˙ - 1 ; T为温度, K; A, A1 , A2 , α , b , n和n1 均为材料常数. 对式(2)和(3)两边取对数, 用不同变形温度下的峰值应力( σ p ) 绘制 l n ε ˙ - l n σ p l n ε ˙ - σ p 1 和b ; 取各温度点n1 和b 的平均值, 分别为n1 =4.24557, b =0.085358; 经式α =b / n1 计算出α 值为0.020105 MPa- 1 .
同理, 将计算出的α 值带入式(1), 绘制 l n ε ˙ - l n s i n h α σ
(5) Q = n R ∂ l n s i n h α σ / ∂ 1000 / T ε ˙
其中, Q为变形激活能, kJ/mol; R为气体常数. 式(5)右端可由 l n s i n h α σ - T - 1 α 2 合金的变形激活能(500 kJ/mol)低[5 ] . 对比其它钛合金和高温合金, 如: TC11的变形激活能为433.98 kJ/mol[16 ] , TC21合金变形激活能为540 kJ/mol[17 ] , γ -TiAl合金的变形激活能为413.53 kJ/mol[18 ] , GH625合金变形激活能为635.38 kJ/mol[19 ] , Ti2AlNb合金的变形激活能为238~327 kJ/mol[20 ] . 可见, TAC-1B合金具有更低的激活能, 这也表明TAC-1B合金具有更加优异的超塑变形性能.
图8 TAC-1B合金不同变形条件下的关系曲线
Fig.8 Curves of lnε ˙ ε ˙
图9 TAC-1B合金不同变形条件下的关系曲线
Fig.9 Curves of lnε ˙ -1 (b) of TAC-1B alloy under different deformation parameters
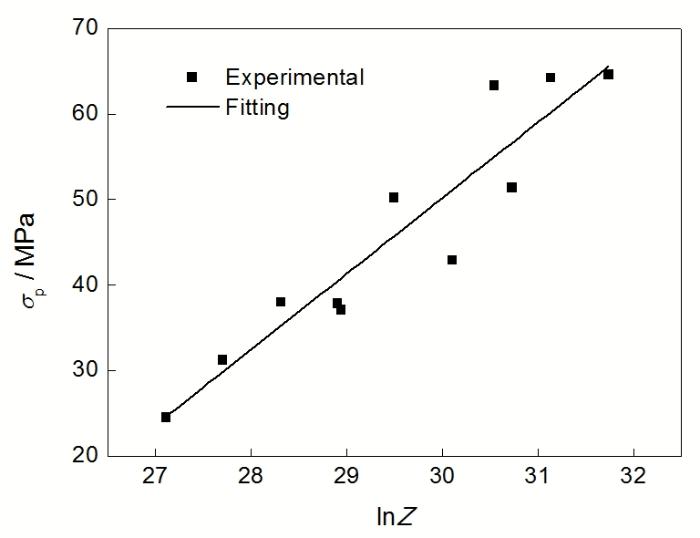
采用最小二乘法对式(3)进行拟合, 经计算可得lnA2 =0.24486lnZ+18.36972, 将回归得到的结果代入式(3)得:
(6) σ p = 11.72 0.75514 l n ε ˙ + 390760 / R T - 18.36972
Z参数和σ p 的关系如图10所示, 其相关系数为86.659%, 在全部应力分布范围内两者较好地符合线性关系, 可见该方程具有较好的可信度. 因此, 式(6)所示本构方程在较宽的应力范围内能够表述TAC-1B合金超塑拉伸变形时的峰值应力的变化规律.
图10 σ p 与Z参数的关系拟合曲线
Fig.10 Fittinsg curve between σ p and Z
3 结论
(1) 采用恒应变速率法研究了1 mm厚Ti-23Al-17Nb合金板材的超塑性, 在960 ℃, 5.5×10- 5 s- 1 时获得最高延伸率为1447.5%.
(2) 高应变速率条件下超塑变形时, 加工硬化小于软化; 而在低应变速率条件下时, 加工硬化大于再结晶软化, 且不同温度条件下的加工硬化率几乎相同, 由于Nb含量的增加导致B2相的增加, 使动态再结晶只能抵消部分加工硬化, 从而导致拉伸过程中加工硬化过程较长.
(3) 随着变形温度的升高, α 2 晶粒尺寸和含量逐渐减小. 随着应变速率的降低, α 2 晶粒尺寸逐渐增大, 但其相含量先减少后增加, 在5.5×10- 5 s- 1 时α 2 相与B2相含量达到平衡, 50∶50时具有最佳变形.
(4) 建立了TAC-1B合金的峰值应力本构方程, 其变形激活能为Q=390.76 kJ/mol, 较其他Ti3 Al合金的激活能低, 表明TAC-1B合金具有更加优异的超塑变形性能.
参考文献
文献选项
[1]
Zhang J W Li S Q Liang X B Cheng Y J Chin J Nonferrous Met , 2010 ; 20 (spec 1 ): s336
[本文引用: 3]
(张建伟 , 李世琼 , 梁晓波 , 程云君 . 中国有色金属学报 , 2010 ; 20 (特辑1 ): s336 )
[本文引用: 3]
[2]
Yang H S Jin P Mukherjee A K Mater Sci Eng , 1992 ; A153 : 457
[本文引用: 3]
[3]
Pilling J Ridley N Islam M F Mater Sci Eng , 1996 ; A205 : 72
[4]
Imayev R Gabdullin N Salishchev G Intermetallics , 1997 ; 5 : 229
[本文引用: 2]
[5]
Fu H C Huang J C Wang T D Bampton C C Acta Mater , 1998 ; 46 : 465
[本文引用: 3]
[6]
Dutta A Banerjee D Scr Metall , 1990 ; 24 : 1319
[本文引用: 2]
[7]
Kim J H Park C G Ha T K Chang Y W Mater Sci Eng , 1999 ; A269 : 197
[本文引用: 1]
[8]
Liauo C S Fu H C Hsiao I C Huang J C Mater Sci Eng , 1999 ; A271 : 275
[本文引用: 1]
[9]
Bendersky L A Boettinger W J Roytburd A Acta Metall Mater , 1991 ; 39 : 1959
[本文引用: 1]
[10]
Muraleedharan K Nandy T K Banerjee D Lele S Metall Trans , 1992 ; 23A : 401
[11]
Baeslack ΙΙΙ W A , Broderick T Sci Technol , 1995 ; 11 : 150
[本文引用: 1]
[12]
Wu Y T Koo C H Intermetallics , 1997 ; 5 : 29
[本文引用: 1]
[13]
Cheng Y J Han J T Zhang J W Liang X B Chin J Nonferrous Met , 2010 ; 20 (spec 1 ): s216
[本文引用: 1]
(程云君 , 韩积亭 , 张建伟 , 梁晓波 . 中国有色金属学报 , 2010 ; 20 (特辑1 ): s216 )
[本文引用: 1]
[14]
Zhang J W Zhang H S Zhang X C Liang X B Cheng Y J Li S Q Rare Met Mater Eng , 2010 ; 39 : 372
[本文引用: 1]
(张建伟 , 张海深 , 张学成 , 梁晓波 , 程云君 , 李世琼 . 稀有金属材料与工程 , 2010 ; 39 : 372 )
[本文引用: 1]
[15]
Jobart D Blandin J J Mater Sci Eng , 1996 ; A207 : 170
[本文引用: 1]
[16]
Zhang X M Cao F Y Yue H Y Feng Y C Guo E J Kang F W Rare Met Mater Eng , 2013 ; 42 : 937
[本文引用: 1]
(张雪敏 , 曹福洋 , 岳红彦 , 冯义成 , 郭二军 , 康福伟 . 稀有金属材料与工程 , 2013 ; 42 : 937 )
[本文引用: 1]
[17]
Zhao J G Zhang S H Cheng M Song H W Chin J Rare Met , 2009 ; 33 : 153
[本文引用: 1]
(赵建国 , 张士宏 , 程 明 , 宋鸿武 . 稀有金属 , 2009 ; 33 : 153 )
[本文引用: 1]
[18]
Fu M J Jing Y J Zhang J Mater Eng , 2011 ; (5 ): 62
[本文引用: 1]
(付明杰 , 静永娟 , 张 继 . 材料工程 , 2011 ; (5 ): 62 )
[本文引用: 1]
[19]
Wu Z G Li D F Chin J Nonferrous Met , 2010 ; 20 : 1321
[本文引用: 2]
(吾志岗 , 李德富 . 中国有色金属学报 , 2010 ; 20 : 1321 )
[本文引用: 2]
[20]
Guo H P Zeng Y S Li Z Q Aeronaut Manuf Technol , 2009 ; (10 ): 64
[本文引用: 1]
(郭和平 , 曾元松 , 李志强 . 航空制造技术 , 2009 ; (10 ): 64 )
[本文引用: 1]
3
2010
... Ti3 Al合金由于其密度低、比强度高和抗氧化性好等突出特点, 可作为航空发动机材料在650 ℃条件下长时工作, 或作为航天发动机材料在900 ℃条件下短时工作[1 ] . 但由于其室温塑性差, 断裂韧度低, 限制了其工程应用. 超塑成形是其有效成形方法之一. 20世纪90年代, 各国学者对其超塑性开展了大量的研究工作, 研究结果发现Ti3 Al合金具有非常好的超塑性, 如美国开发的普通α 2 合金Ti-24Al-11Nb (原子分数, %, 下同)和超α 2 合金(Super α 2 合金)Ti-25Al-10Nb-3V-1Mo[2 -5 ] . Dutta和Banerjee[6 ] 对Ti-24Al-11Nb合金不同相比例的超塑性研究发现, 获得最佳超塑性的α 2 /b 不是50∶50, 而是包含75%的α 2 相, 当在1020 ℃变形时, α 2 相体积分数增加到85%时, 所获得的延伸率也优于50∶50的. Yang等[2 ] 分别对Super α 2 合金和普通α 2 合金进行的超塑性研究发现, 对于Super α 2 合金, 长条α 2 晶粒在变形初始阶段发生破碎、球化, 随着应变增加, 晶粒长大; 高应变区与普通α 2 合金相同, α 2 晶粒含量很少, 然而, 2种合金之间的不同点是, Super α 2 合金中b 相体积分数增加会减少α 2 /b 相边界, 从而降低了晶界滑移的能力. 相反, 对于普通α 2 合金, b 晶粒是包围α 2 晶粒分布的, 这更有益于易扩散的、较软的b 相协调晶界滑移. Kim等[7 ] 通过透射电镜(TEM)研究了Ti-24Al-11Nb合金 的超塑性变形机理, 发现局部位错发生在α 2 /α 2 晶界和α 2 /b 相界处, 而α 2 晶粒内部很少有位错产生, 较软的b 相发生剧烈变形, 且位错主要堆积在晶粒三角区内, 认为晶界滑移是Ti3 Al合金超塑变形的主要机制. ...
... 与以上2种典型合金相比, Ti-23Al-17Nb (TAC-1B)由于添加更多的稳定b 相的合金元素Nb, 通过特殊热机械处理可使合金常规组织由α 2 +B2两相变为α 2 +B2+O三相, 具有更加优异的综合性能[1 ] , 本工作针对TAC-1B合金轧制板材超塑性开展研究, 为其工程应用奠定理论基础. ...
... 采用以下双曲正弦形Arrhenius方程描述TAC-1B合金的本构关系[1 ] [6 -19 ] : ...
3
2010
... Ti3 Al合金由于其密度低、比强度高和抗氧化性好等突出特点, 可作为航空发动机材料在650 ℃条件下长时工作, 或作为航天发动机材料在900 ℃条件下短时工作[1 ] . 但由于其室温塑性差, 断裂韧度低, 限制了其工程应用. 超塑成形是其有效成形方法之一. 20世纪90年代, 各国学者对其超塑性开展了大量的研究工作, 研究结果发现Ti3 Al合金具有非常好的超塑性, 如美国开发的普通α 2 合金Ti-24Al-11Nb (原子分数, %, 下同)和超α 2 合金(Super α 2 合金)Ti-25Al-10Nb-3V-1Mo[2 -5 ] . Dutta和Banerjee[6 ] 对Ti-24Al-11Nb合金不同相比例的超塑性研究发现, 获得最佳超塑性的α 2 /b 不是50∶50, 而是包含75%的α 2 相, 当在1020 ℃变形时, α 2 相体积分数增加到85%时, 所获得的延伸率也优于50∶50的. Yang等[2 ] 分别对Super α 2 合金和普通α 2 合金进行的超塑性研究发现, 对于Super α 2 合金, 长条α 2 晶粒在变形初始阶段发生破碎、球化, 随着应变增加, 晶粒长大; 高应变区与普通α 2 合金相同, α 2 晶粒含量很少, 然而, 2种合金之间的不同点是, Super α 2 合金中b 相体积分数增加会减少α 2 /b 相边界, 从而降低了晶界滑移的能力. 相反, 对于普通α 2 合金, b 晶粒是包围α 2 晶粒分布的, 这更有益于易扩散的、较软的b 相协调晶界滑移. Kim等[7 ] 通过透射电镜(TEM)研究了Ti-24Al-11Nb合金 的超塑性变形机理, 发现局部位错发生在α 2 /α 2 晶界和α 2 /b 相界处, 而α 2 晶粒内部很少有位错产生, 较软的b 相发生剧烈变形, 且位错主要堆积在晶粒三角区内, 认为晶界滑移是Ti3 Al合金超塑变形的主要机制. ...
... 与以上2种典型合金相比, Ti-23Al-17Nb (TAC-1B)由于添加更多的稳定b 相的合金元素Nb, 通过特殊热机械处理可使合金常规组织由α 2 +B2两相变为α 2 +B2+O三相, 具有更加优异的综合性能[1 ] , 本工作针对TAC-1B合金轧制板材超塑性开展研究, 为其工程应用奠定理论基础. ...
... 采用以下双曲正弦形Arrhenius方程描述TAC-1B合金的本构关系[1 ] [6 -19 ] : ...
3
1992
... Ti3 Al合金由于其密度低、比强度高和抗氧化性好等突出特点, 可作为航空发动机材料在650 ℃条件下长时工作, 或作为航天发动机材料在900 ℃条件下短时工作[1 ] . 但由于其室温塑性差, 断裂韧度低, 限制了其工程应用. 超塑成形是其有效成形方法之一. 20世纪90年代, 各国学者对其超塑性开展了大量的研究工作, 研究结果发现Ti3 Al合金具有非常好的超塑性, 如美国开发的普通α 2 合金Ti-24Al-11Nb (原子分数, %, 下同)和超α 2 合金(Super α 2 合金)Ti-25Al-10Nb-3V-1Mo[2 -5 ] . Dutta和Banerjee[6 ] 对Ti-24Al-11Nb合金不同相比例的超塑性研究发现, 获得最佳超塑性的α 2 /b 不是50∶50, 而是包含75%的α 2 相, 当在1020 ℃变形时, α 2 相体积分数增加到85%时, 所获得的延伸率也优于50∶50的. Yang等[2 ] 分别对Super α 2 合金和普通α 2 合金进行的超塑性研究发现, 对于Super α 2 合金, 长条α 2 晶粒在变形初始阶段发生破碎、球化, 随着应变增加, 晶粒长大; 高应变区与普通α 2 合金相同, α 2 晶粒含量很少, 然而, 2种合金之间的不同点是, Super α 2 合金中b 相体积分数增加会减少α 2 /b 相边界, 从而降低了晶界滑移的能力. 相反, 对于普通α 2 合金, b 晶粒是包围α 2 晶粒分布的, 这更有益于易扩散的、较软的b 相协调晶界滑移. Kim等[7 ] 通过透射电镜(TEM)研究了Ti-24Al-11Nb合金 的超塑性变形机理, 发现局部位错发生在α 2 /α 2 晶界和α 2 /b 相界处, 而α 2 晶粒内部很少有位错产生, 较软的b 相发生剧烈变形, 且位错主要堆积在晶粒三角区内, 认为晶界滑移是Ti3 Al合金超塑变形的主要机制. ...
... [2 ]分别对Super α 2 合金和普通α 2 合金进行的超塑性研究发现, 对于Super α 2 合金, 长条α 2 晶粒在变形初始阶段发生破碎、球化, 随着应变增加, 晶粒长大; 高应变区与普通α 2 合金相同, α 2 晶粒含量很少, 然而, 2种合金之间的不同点是, Super α 2 合金中b 相体积分数增加会减少α 2 /b 相边界, 从而降低了晶界滑移的能力. 相反, 对于普通α 2 合金, b 晶粒是包围α 2 晶粒分布的, 这更有益于易扩散的、较软的b 相协调晶界滑移. Kim等[7 ] 通过透射电镜(TEM)研究了Ti-24Al-11Nb合金 的超塑性变形机理, 发现局部位错发生在α 2 /α 2 晶界和α 2 /b 相界处, 而α 2 晶粒内部很少有位错产生, 较软的b 相发生剧烈变形, 且位错主要堆积在晶粒三角区内, 认为晶界滑移是Ti3 Al合金超塑变形的主要机制. ...
... 图2所示为TAC-1B合金在不同拉伸条件下的超塑拉伸结果. 如图2a所示, 在相同应变速率条件下, 延伸率随温度的升高先增加后减小, 呈抛物线形变化, 并且均在960 ℃时获得最高值. 随着应变速率的降低, 变形温度对延伸率的影响逐渐明显(图2b), 实验条件范围内, 在960 ℃, 5.5×10- 5 s- 1 时获得最高延伸率为1447.5%. 此结果与Super α 2 合金所获得的最高延伸率相当[2 -4 ] , 远高于普通α 2 合金(Ti-24Al-11Nb)所获的延伸率. Liauo等[8 ] 对Super α 2 合金的b 相有序/无序转变温度(TO-D )进行了研究, 发现其有序/无序转变温度为1100 ℃, 表明在1100 ℃以下变形时, b 相为有序结构, 即为B2相, 在超塑变形过程中b 晶粒的协调变形机制与α 2 相一致, 主要通过位错滑移和攀移来实现, 这表明b 相并非软相. 对于其它成分的Ti3 Al合金[9 -11 ] , 其TO- D 也均高于1100 ℃. Wu和Koo[12 ] 对织构与超塑性的关系研究认为, 有织构的超塑性优于无织构的, 是因为织构增加了位错可动性. 然而, 经过大变形后, 织构会通过晶界的滑移和晶粒的转动而消除, 不会对超塑性产生更多的影响. 而TAC-1B合金获得高延伸率的原因可能与Nb含量的增加有关, Nb元素为B2相稳定元素, B2相为具有较多可动滑移系的bcc结构而有助于合金塑性的改善, 其晶粒内特有的亚组织结构又是合金强化的有利因素, 从而使其超塑性变形能力有效提高. ...
2
1997
... 图2所示为TAC-1B合金在不同拉伸条件下的超塑拉伸结果. 如图2a所示, 在相同应变速率条件下, 延伸率随温度的升高先增加后减小, 呈抛物线形变化, 并且均在960 ℃时获得最高值. 随着应变速率的降低, 变形温度对延伸率的影响逐渐明显(图2b), 实验条件范围内, 在960 ℃, 5.5×10- 5 s- 1 时获得最高延伸率为1447.5%. 此结果与Super α 2 合金所获得的最高延伸率相当[2 -4 ] , 远高于普通α 2 合金(Ti-24Al-11Nb)所获的延伸率. Liauo等[8 ] 对Super α 2 合金的b 相有序/无序转变温度(TO-D )进行了研究, 发现其有序/无序转变温度为1100 ℃, 表明在1100 ℃以下变形时, b 相为有序结构, 即为B2相, 在超塑变形过程中b 晶粒的协调变形机制与α 2 相一致, 主要通过位错滑移和攀移来实现, 这表明b 相并非软相. 对于其它成分的Ti3 Al合金[9 -11 ] , 其TO- D 也均高于1100 ℃. Wu和Koo[12 ] 对织构与超塑性的关系研究认为, 有织构的超塑性优于无织构的, 是因为织构增加了位错可动性. 然而, 经过大变形后, 织构会通过晶界的滑移和晶粒的转动而消除, 不会对超塑性产生更多的影响. 而TAC-1B合金获得高延伸率的原因可能与Nb含量的增加有关, Nb元素为B2相稳定元素, B2相为具有较多可动滑移系的bcc结构而有助于合金塑性的改善, 其晶粒内特有的亚组织结构又是合金强化的有利因素, 从而使其超塑性变形能力有效提高. ...
... 图3所示为不同应变速率和变形温度的应力-应变曲线. 其共同特征为流变应力随着应变的增加达到峰值应力后逐渐减小, 软化阶段应力减小迅速, 加工硬化和动态再结晶软化始终未出现平衡. 应变速率为1.7×10- 3 s- 1 时, 除940 ℃外, 其余3个温度的峰值应力几乎相同(图3a). 应变速率降低, 则峰值应力对应的应变(峰值应变)随着温度的升高先增加后减小. 应变速率为3.3×10- 4 s- 1 时, 加工硬化率随着温度的升高而逐渐增加(图3b). 应变速率减小至5.5×10- 5 s- 1 时, 不同温度的加工硬化率几乎相同(图3c). 这表明, 温度越高、应变速率越低, 动态硬化的效果越明显, 高于再结晶软化程度, 从而导致应力逐渐增加. 尤其是在应变速率为3.3×10- 4 和5.5×10- 5 s- 1 条件时, 变形一旦超过峰值应变时, 软化程度大于硬化程度后应力迅速下降, 直至试样发生断裂. 对于高应变速率的应力-应变曲线(图3a), Imayev等[4 ] 通过组织分析解释了应力-应变曲线, 认为强化阶段与缺陷的不断聚集和初始晶粒的长大有关, 缺陷的产生由晶界滑移造成, 而晶界滑移不仅是塑性变形机制, 也是组织的回复机制, 这是因为它对由晶界滑移产生的位错的吸收有贡献; 随着应变速率 ε ˙ σ 的迅速增加, 即使在最佳变形条件下, σ 也表现很高. 对于低应变速率的曲线, 图3b和c, 其硬化阶段远高于软化的, 由于B2相的变形机制主要通过位滑移和攀移来实现, 可能由于Nb含量的增加导致B2相的增加, 使动态再结晶只能抵消部分加工硬化, 从而导致应力在拉伸过程中大部分表现为增加. ...
3
1998
... Ti3 Al合金由于其密度低、比强度高和抗氧化性好等突出特点, 可作为航空发动机材料在650 ℃条件下长时工作, 或作为航天发动机材料在900 ℃条件下短时工作[1 ] . 但由于其室温塑性差, 断裂韧度低, 限制了其工程应用. 超塑成形是其有效成形方法之一. 20世纪90年代, 各国学者对其超塑性开展了大量的研究工作, 研究结果发现Ti3 Al合金具有非常好的超塑性, 如美国开发的普通α 2 合金Ti-24Al-11Nb (原子分数, %, 下同)和超α 2 合金(Super α 2 合金)Ti-25Al-10Nb-3V-1Mo[2 -5 ] . Dutta和Banerjee[6 ] 对Ti-24Al-11Nb合金不同相比例的超塑性研究发现, 获得最佳超塑性的α 2 /b 不是50∶50, 而是包含75%的α 2 相, 当在1020 ℃变形时, α 2 相体积分数增加到85%时, 所获得的延伸率也优于50∶50的. Yang等[2 ] 分别对Super α 2 合金和普通α 2 合金进行的超塑性研究发现, 对于Super α 2 合金, 长条α 2 晶粒在变形初始阶段发生破碎、球化, 随着应变增加, 晶粒长大; 高应变区与普通α 2 合金相同, α 2 晶粒含量很少, 然而, 2种合金之间的不同点是, Super α 2 合金中b 相体积分数增加会减少α 2 /b 相边界, 从而降低了晶界滑移的能力. 相反, 对于普通α 2 合金, b 晶粒是包围α 2 晶粒分布的, 这更有益于易扩散的、较软的b 相协调晶界滑移. Kim等[7 ] 通过透射电镜(TEM)研究了Ti-24Al-11Nb合金 的超塑性变形机理, 发现局部位错发生在α 2 /α 2 晶界和α 2 /b 相界处, 而α 2 晶粒内部很少有位错产生, 较软的b 相发生剧烈变形, 且位错主要堆积在晶粒三角区内, 认为晶界滑移是Ti3 Al合金超塑变形的主要机制. ...
... 图5所示为应变速率为3.3×10- 4 s- 1 时试样纵截面微观组织随温度的变化. 对比L向的原始组织(图4a)可以发现, 原始组织中的纤维组织完全消失, 各条件下的α 2 晶粒均呈等轴状, 这表明超塑拉伸过程中长条状α 2 晶粒发生了拉长、断裂和球化, 进而获得更加适合超塑变形的等轴晶粒组织, 这可以充分发挥另外一种变形机制, 即晶粒转动. Ti3 Al基合金中的α 2 相在塑性变形中有3种可以开动的滑移系, 即基面的 0001 11 2 ̅ 0 1 1 ̅ 00 11 2 ̅ 0 11 2 ̅ 1 11 2 ̅ 6 α 2 相晶体向不同方向转动[13 ,14 ] . 图6所示为沿拉伸试样横截面观察的微观组织. 可见, 此截面的微观组织与纵截面的相同, 各条件下的α 2 晶粒也均呈等轴状, 这表明晶粒转动为TAC-1B合金的主变形机制之一. 还可以发现, 随着温度的升高, α 2 晶粒尺寸逐渐减小, 在960 ℃时平均晶粒尺寸为5 μm. 晶粒尺寸越小, 晶界越多, 而Ti3 Al合金的变形机制以晶界滑移机制为主. 因此, 细晶粒的晶界多, 滑移更加容易, 导致所获得的延伸率更高. 然而, 随着温度继续升高, α 2 晶粒尺寸并未增大, 980和1000 ℃的α 2 晶粒大小基本相当, 均约为4 μm, 3个温度的α 2 晶粒都小于940 ℃的(约15 μm). 这与Jobart等[15 ] 的结果恰好相反, 他发现随温度升高、应变增加, α 2 晶粒尺寸逐渐增大. 影响Ti3 Al合金超塑性的另外一个主要因素是相比例. 可见, 随着变形温度的升高, B2相含量逐渐增加, 与Fu等[5 ] 报道的一致. ...
... 其中, Q为变形激活能, kJ/mol; R为气体常数. 式(5)右端可由 l n s i n h α σ - T - 1 α 2 合金的变形激活能(500 kJ/mol)低[5 ] . 对比其它钛合金和高温合金, 如: TC11的变形激活能为433.98 kJ/mol[16 ] , TC21合金变形激活能为540 kJ/mol[17 ] , γ -TiAl合金的变形激活能为413.53 kJ/mol[18 ] , GH625合金变形激活能为635.38 kJ/mol[19 ] , Ti2AlNb合金的变形激活能为238~327 kJ/mol[20 ] . 可见, TAC-1B合金具有更低的激活能, 这也表明TAC-1B合金具有更加优异的超塑变形性能. ...
2
1990
... Ti3 Al合金由于其密度低、比强度高和抗氧化性好等突出特点, 可作为航空发动机材料在650 ℃条件下长时工作, 或作为航天发动机材料在900 ℃条件下短时工作[1 ] . 但由于其室温塑性差, 断裂韧度低, 限制了其工程应用. 超塑成形是其有效成形方法之一. 20世纪90年代, 各国学者对其超塑性开展了大量的研究工作, 研究结果发现Ti3 Al合金具有非常好的超塑性, 如美国开发的普通α 2 合金Ti-24Al-11Nb (原子分数, %, 下同)和超α 2 合金(Super α 2 合金)Ti-25Al-10Nb-3V-1Mo[2 -5 ] . Dutta和Banerjee[6 ] 对Ti-24Al-11Nb合金不同相比例的超塑性研究发现, 获得最佳超塑性的α 2 /b 不是50∶50, 而是包含75%的α 2 相, 当在1020 ℃变形时, α 2 相体积分数增加到85%时, 所获得的延伸率也优于50∶50的. Yang等[2 ] 分别对Super α 2 合金和普通α 2 合金进行的超塑性研究发现, 对于Super α 2 合金, 长条α 2 晶粒在变形初始阶段发生破碎、球化, 随着应变增加, 晶粒长大; 高应变区与普通α 2 合金相同, α 2 晶粒含量很少, 然而, 2种合金之间的不同点是, Super α 2 合金中b 相体积分数增加会减少α 2 /b 相边界, 从而降低了晶界滑移的能力. 相反, 对于普通α 2 合金, b 晶粒是包围α 2 晶粒分布的, 这更有益于易扩散的、较软的b 相协调晶界滑移. Kim等[7 ] 通过透射电镜(TEM)研究了Ti-24Al-11Nb合金 的超塑性变形机理, 发现局部位错发生在α 2 /α 2 晶界和α 2 /b 相界处, 而α 2 晶粒内部很少有位错产生, 较软的b 相发生剧烈变形, 且位错主要堆积在晶粒三角区内, 认为晶界滑移是Ti3 Al合金超塑变形的主要机制. ...
... 采用以下双曲正弦形Arrhenius方程描述TAC-1B合金的本构关系[1 ] [6 -19 ] : ...
1
1999
... Ti3 Al合金由于其密度低、比强度高和抗氧化性好等突出特点, 可作为航空发动机材料在650 ℃条件下长时工作, 或作为航天发动机材料在900 ℃条件下短时工作[1 ] . 但由于其室温塑性差, 断裂韧度低, 限制了其工程应用. 超塑成形是其有效成形方法之一. 20世纪90年代, 各国学者对其超塑性开展了大量的研究工作, 研究结果发现Ti3 Al合金具有非常好的超塑性, 如美国开发的普通α 2 合金Ti-24Al-11Nb (原子分数, %, 下同)和超α 2 合金(Super α 2 合金)Ti-25Al-10Nb-3V-1Mo[2 -5 ] . Dutta和Banerjee[6 ] 对Ti-24Al-11Nb合金不同相比例的超塑性研究发现, 获得最佳超塑性的α 2 /b 不是50∶50, 而是包含75%的α 2 相, 当在1020 ℃变形时, α 2 相体积分数增加到85%时, 所获得的延伸率也优于50∶50的. Yang等[2 ] 分别对Super α 2 合金和普通α 2 合金进行的超塑性研究发现, 对于Super α 2 合金, 长条α 2 晶粒在变形初始阶段发生破碎、球化, 随着应变增加, 晶粒长大; 高应变区与普通α 2 合金相同, α 2 晶粒含量很少, 然而, 2种合金之间的不同点是, Super α 2 合金中b 相体积分数增加会减少α 2 /b 相边界, 从而降低了晶界滑移的能力. 相反, 对于普通α 2 合金, b 晶粒是包围α 2 晶粒分布的, 这更有益于易扩散的、较软的b 相协调晶界滑移. Kim等[7 ] 通过透射电镜(TEM)研究了Ti-24Al-11Nb合金 的超塑性变形机理, 发现局部位错发生在α 2 /α 2 晶界和α 2 /b 相界处, 而α 2 晶粒内部很少有位错产生, 较软的b 相发生剧烈变形, 且位错主要堆积在晶粒三角区内, 认为晶界滑移是Ti3 Al合金超塑变形的主要机制. ...
1
1999
... 图2所示为TAC-1B合金在不同拉伸条件下的超塑拉伸结果. 如图2a所示, 在相同应变速率条件下, 延伸率随温度的升高先增加后减小, 呈抛物线形变化, 并且均在960 ℃时获得最高值. 随着应变速率的降低, 变形温度对延伸率的影响逐渐明显(图2b), 实验条件范围内, 在960 ℃, 5.5×10- 5 s- 1 时获得最高延伸率为1447.5%. 此结果与Super α 2 合金所获得的最高延伸率相当[2 -4 ] , 远高于普通α 2 合金(Ti-24Al-11Nb)所获的延伸率. Liauo等[8 ] 对Super α 2 合金的b 相有序/无序转变温度(TO-D )进行了研究, 发现其有序/无序转变温度为1100 ℃, 表明在1100 ℃以下变形时, b 相为有序结构, 即为B2相, 在超塑变形过程中b 晶粒的协调变形机制与α 2 相一致, 主要通过位错滑移和攀移来实现, 这表明b 相并非软相. 对于其它成分的Ti3 Al合金[9 -11 ] , 其TO- D 也均高于1100 ℃. Wu和Koo[12 ] 对织构与超塑性的关系研究认为, 有织构的超塑性优于无织构的, 是因为织构增加了位错可动性. 然而, 经过大变形后, 织构会通过晶界的滑移和晶粒的转动而消除, 不会对超塑性产生更多的影响. 而TAC-1B合金获得高延伸率的原因可能与Nb含量的增加有关, Nb元素为B2相稳定元素, B2相为具有较多可动滑移系的bcc结构而有助于合金塑性的改善, 其晶粒内特有的亚组织结构又是合金强化的有利因素, 从而使其超塑性变形能力有效提高. ...
1
1991
... 图2所示为TAC-1B合金在不同拉伸条件下的超塑拉伸结果. 如图2a所示, 在相同应变速率条件下, 延伸率随温度的升高先增加后减小, 呈抛物线形变化, 并且均在960 ℃时获得最高值. 随着应变速率的降低, 变形温度对延伸率的影响逐渐明显(图2b), 实验条件范围内, 在960 ℃, 5.5×10- 5 s- 1 时获得最高延伸率为1447.5%. 此结果与Super α 2 合金所获得的最高延伸率相当[2 -4 ] , 远高于普通α 2 合金(Ti-24Al-11Nb)所获的延伸率. Liauo等[8 ] 对Super α 2 合金的b 相有序/无序转变温度(TO-D )进行了研究, 发现其有序/无序转变温度为1100 ℃, 表明在1100 ℃以下变形时, b 相为有序结构, 即为B2相, 在超塑变形过程中b 晶粒的协调变形机制与α 2 相一致, 主要通过位错滑移和攀移来实现, 这表明b 相并非软相. 对于其它成分的Ti3 Al合金[9 -11 ] , 其TO- D 也均高于1100 ℃. Wu和Koo[12 ] 对织构与超塑性的关系研究认为, 有织构的超塑性优于无织构的, 是因为织构增加了位错可动性. 然而, 经过大变形后, 织构会通过晶界的滑移和晶粒的转动而消除, 不会对超塑性产生更多的影响. 而TAC-1B合金获得高延伸率的原因可能与Nb含量的增加有关, Nb元素为B2相稳定元素, B2相为具有较多可动滑移系的bcc结构而有助于合金塑性的改善, 其晶粒内特有的亚组织结构又是合金强化的有利因素, 从而使其超塑性变形能力有效提高. ...
1
1995
... 图2所示为TAC-1B合金在不同拉伸条件下的超塑拉伸结果. 如图2a所示, 在相同应变速率条件下, 延伸率随温度的升高先增加后减小, 呈抛物线形变化, 并且均在960 ℃时获得最高值. 随着应变速率的降低, 变形温度对延伸率的影响逐渐明显(图2b), 实验条件范围内, 在960 ℃, 5.5×10- 5 s- 1 时获得最高延伸率为1447.5%. 此结果与Super α 2 合金所获得的最高延伸率相当[2 -4 ] , 远高于普通α 2 合金(Ti-24Al-11Nb)所获的延伸率. Liauo等[8 ] 对Super α 2 合金的b 相有序/无序转变温度(TO-D )进行了研究, 发现其有序/无序转变温度为1100 ℃, 表明在1100 ℃以下变形时, b 相为有序结构, 即为B2相, 在超塑变形过程中b 晶粒的协调变形机制与α 2 相一致, 主要通过位错滑移和攀移来实现, 这表明b 相并非软相. 对于其它成分的Ti3 Al合金[9 -11 ] , 其TO- D 也均高于1100 ℃. Wu和Koo[12 ] 对织构与超塑性的关系研究认为, 有织构的超塑性优于无织构的, 是因为织构增加了位错可动性. 然而, 经过大变形后, 织构会通过晶界的滑移和晶粒的转动而消除, 不会对超塑性产生更多的影响. 而TAC-1B合金获得高延伸率的原因可能与Nb含量的增加有关, Nb元素为B2相稳定元素, B2相为具有较多可动滑移系的bcc结构而有助于合金塑性的改善, 其晶粒内特有的亚组织结构又是合金强化的有利因素, 从而使其超塑性变形能力有效提高. ...
1
1997
... 图2所示为TAC-1B合金在不同拉伸条件下的超塑拉伸结果. 如图2a所示, 在相同应变速率条件下, 延伸率随温度的升高先增加后减小, 呈抛物线形变化, 并且均在960 ℃时获得最高值. 随着应变速率的降低, 变形温度对延伸率的影响逐渐明显(图2b), 实验条件范围内, 在960 ℃, 5.5×10- 5 s- 1 时获得最高延伸率为1447.5%. 此结果与Super α 2 合金所获得的最高延伸率相当[2 -4 ] , 远高于普通α 2 合金(Ti-24Al-11Nb)所获的延伸率. Liauo等[8 ] 对Super α 2 合金的b 相有序/无序转变温度(TO-D )进行了研究, 发现其有序/无序转变温度为1100 ℃, 表明在1100 ℃以下变形时, b 相为有序结构, 即为B2相, 在超塑变形过程中b 晶粒的协调变形机制与α 2 相一致, 主要通过位错滑移和攀移来实现, 这表明b 相并非软相. 对于其它成分的Ti3 Al合金[9 -11 ] , 其TO- D 也均高于1100 ℃. Wu和Koo[12 ] 对织构与超塑性的关系研究认为, 有织构的超塑性优于无织构的, 是因为织构增加了位错可动性. 然而, 经过大变形后, 织构会通过晶界的滑移和晶粒的转动而消除, 不会对超塑性产生更多的影响. 而TAC-1B合金获得高延伸率的原因可能与Nb含量的增加有关, Nb元素为B2相稳定元素, B2相为具有较多可动滑移系的bcc结构而有助于合金塑性的改善, 其晶粒内特有的亚组织结构又是合金强化的有利因素, 从而使其超塑性变形能力有效提高. ...
1
2010
... 图5所示为应变速率为3.3×10- 4 s- 1 时试样纵截面微观组织随温度的变化. 对比L向的原始组织(图4a)可以发现, 原始组织中的纤维组织完全消失, 各条件下的α 2 晶粒均呈等轴状, 这表明超塑拉伸过程中长条状α 2 晶粒发生了拉长、断裂和球化, 进而获得更加适合超塑变形的等轴晶粒组织, 这可以充分发挥另外一种变形机制, 即晶粒转动. Ti3 Al基合金中的α 2 相在塑性变形中有3种可以开动的滑移系, 即基面的 0001 11 2 ̅ 0 1 1 ̅ 00 11 2 ̅ 0 11 2 ̅ 1 11 2 ̅ 6 α 2 相晶体向不同方向转动[13 ,14 ] . 图6所示为沿拉伸试样横截面观察的微观组织. 可见, 此截面的微观组织与纵截面的相同, 各条件下的α 2 晶粒也均呈等轴状, 这表明晶粒转动为TAC-1B合金的主变形机制之一. 还可以发现, 随着温度的升高, α 2 晶粒尺寸逐渐减小, 在960 ℃时平均晶粒尺寸为5 μm. 晶粒尺寸越小, 晶界越多, 而Ti3 Al合金的变形机制以晶界滑移机制为主. 因此, 细晶粒的晶界多, 滑移更加容易, 导致所获得的延伸率更高. 然而, 随着温度继续升高, α 2 晶粒尺寸并未增大, 980和1000 ℃的α 2 晶粒大小基本相当, 均约为4 μm, 3个温度的α 2 晶粒都小于940 ℃的(约15 μm). 这与Jobart等[15 ] 的结果恰好相反, 他发现随温度升高、应变增加, α 2 晶粒尺寸逐渐增大. 影响Ti3 Al合金超塑性的另外一个主要因素是相比例. 可见, 随着变形温度的升高, B2相含量逐渐增加, 与Fu等[5 ] 报道的一致. ...
1
2010
... 图5所示为应变速率为3.3×10- 4 s- 1 时试样纵截面微观组织随温度的变化. 对比L向的原始组织(图4a)可以发现, 原始组织中的纤维组织完全消失, 各条件下的α 2 晶粒均呈等轴状, 这表明超塑拉伸过程中长条状α 2 晶粒发生了拉长、断裂和球化, 进而获得更加适合超塑变形的等轴晶粒组织, 这可以充分发挥另外一种变形机制, 即晶粒转动. Ti3 Al基合金中的α 2 相在塑性变形中有3种可以开动的滑移系, 即基面的 0001 11 2 ̅ 0 1 1 ̅ 00 11 2 ̅ 0 11 2 ̅ 1 11 2 ̅ 6 α 2 相晶体向不同方向转动[13 ,14 ] . 图6所示为沿拉伸试样横截面观察的微观组织. 可见, 此截面的微观组织与纵截面的相同, 各条件下的α 2 晶粒也均呈等轴状, 这表明晶粒转动为TAC-1B合金的主变形机制之一. 还可以发现, 随着温度的升高, α 2 晶粒尺寸逐渐减小, 在960 ℃时平均晶粒尺寸为5 μm. 晶粒尺寸越小, 晶界越多, 而Ti3 Al合金的变形机制以晶界滑移机制为主. 因此, 细晶粒的晶界多, 滑移更加容易, 导致所获得的延伸率更高. 然而, 随着温度继续升高, α 2 晶粒尺寸并未增大, 980和1000 ℃的α 2 晶粒大小基本相当, 均约为4 μm, 3个温度的α 2 晶粒都小于940 ℃的(约15 μm). 这与Jobart等[15 ] 的结果恰好相反, 他发现随温度升高、应变增加, α 2 晶粒尺寸逐渐增大. 影响Ti3 Al合金超塑性的另外一个主要因素是相比例. 可见, 随着变形温度的升高, B2相含量逐渐增加, 与Fu等[5 ] 报道的一致. ...
1
2010
... 图5所示为应变速率为3.3×10- 4 s- 1 时试样纵截面微观组织随温度的变化. 对比L向的原始组织(图4a)可以发现, 原始组织中的纤维组织完全消失, 各条件下的α 2 晶粒均呈等轴状, 这表明超塑拉伸过程中长条状α 2 晶粒发生了拉长、断裂和球化, 进而获得更加适合超塑变形的等轴晶粒组织, 这可以充分发挥另外一种变形机制, 即晶粒转动. Ti3 Al基合金中的α 2 相在塑性变形中有3种可以开动的滑移系, 即基面的 0001 11 2 ̅ 0 1 1 ̅ 00 11 2 ̅ 0 11 2 ̅ 1 11 2 ̅ 6 α 2 相晶体向不同方向转动[13 ,14 ] . 图6所示为沿拉伸试样横截面观察的微观组织. 可见, 此截面的微观组织与纵截面的相同, 各条件下的α 2 晶粒也均呈等轴状, 这表明晶粒转动为TAC-1B合金的主变形机制之一. 还可以发现, 随着温度的升高, α 2 晶粒尺寸逐渐减小, 在960 ℃时平均晶粒尺寸为5 μm. 晶粒尺寸越小, 晶界越多, 而Ti3 Al合金的变形机制以晶界滑移机制为主. 因此, 细晶粒的晶界多, 滑移更加容易, 导致所获得的延伸率更高. 然而, 随着温度继续升高, α 2 晶粒尺寸并未增大, 980和1000 ℃的α 2 晶粒大小基本相当, 均约为4 μm, 3个温度的α 2 晶粒都小于940 ℃的(约15 μm). 这与Jobart等[15 ] 的结果恰好相反, 他发现随温度升高、应变增加, α 2 晶粒尺寸逐渐增大. 影响Ti3 Al合金超塑性的另外一个主要因素是相比例. 可见, 随着变形温度的升高, B2相含量逐渐增加, 与Fu等[5 ] 报道的一致. ...
1
2010
... 图5所示为应变速率为3.3×10- 4 s- 1 时试样纵截面微观组织随温度的变化. 对比L向的原始组织(图4a)可以发现, 原始组织中的纤维组织完全消失, 各条件下的α 2 晶粒均呈等轴状, 这表明超塑拉伸过程中长条状α 2 晶粒发生了拉长、断裂和球化, 进而获得更加适合超塑变形的等轴晶粒组织, 这可以充分发挥另外一种变形机制, 即晶粒转动. Ti3 Al基合金中的α 2 相在塑性变形中有3种可以开动的滑移系, 即基面的 0001 11 2 ̅ 0 1 1 ̅ 00 11 2 ̅ 0 11 2 ̅ 1 11 2 ̅ 6 α 2 相晶体向不同方向转动[13 ,14 ] . 图6所示为沿拉伸试样横截面观察的微观组织. 可见, 此截面的微观组织与纵截面的相同, 各条件下的α 2 晶粒也均呈等轴状, 这表明晶粒转动为TAC-1B合金的主变形机制之一. 还可以发现, 随着温度的升高, α 2 晶粒尺寸逐渐减小, 在960 ℃时平均晶粒尺寸为5 μm. 晶粒尺寸越小, 晶界越多, 而Ti3 Al合金的变形机制以晶界滑移机制为主. 因此, 细晶粒的晶界多, 滑移更加容易, 导致所获得的延伸率更高. 然而, 随着温度继续升高, α 2 晶粒尺寸并未增大, 980和1000 ℃的α 2 晶粒大小基本相当, 均约为4 μm, 3个温度的α 2 晶粒都小于940 ℃的(约15 μm). 这与Jobart等[15 ] 的结果恰好相反, 他发现随温度升高、应变增加, α 2 晶粒尺寸逐渐增大. 影响Ti3 Al合金超塑性的另外一个主要因素是相比例. 可见, 随着变形温度的升高, B2相含量逐渐增加, 与Fu等[5 ] 报道的一致. ...
1
1996
... 图5所示为应变速率为3.3×10- 4 s- 1 时试样纵截面微观组织随温度的变化. 对比L向的原始组织(图4a)可以发现, 原始组织中的纤维组织完全消失, 各条件下的α 2 晶粒均呈等轴状, 这表明超塑拉伸过程中长条状α 2 晶粒发生了拉长、断裂和球化, 进而获得更加适合超塑变形的等轴晶粒组织, 这可以充分发挥另外一种变形机制, 即晶粒转动. Ti3 Al基合金中的α 2 相在塑性变形中有3种可以开动的滑移系, 即基面的 0001 11 2 ̅ 0 1 1 ̅ 00 11 2 ̅ 0 11 2 ̅ 1 11 2 ̅ 6 α 2 相晶体向不同方向转动[13 ,14 ] . 图6所示为沿拉伸试样横截面观察的微观组织. 可见, 此截面的微观组织与纵截面的相同, 各条件下的α 2 晶粒也均呈等轴状, 这表明晶粒转动为TAC-1B合金的主变形机制之一. 还可以发现, 随着温度的升高, α 2 晶粒尺寸逐渐减小, 在960 ℃时平均晶粒尺寸为5 μm. 晶粒尺寸越小, 晶界越多, 而Ti3 Al合金的变形机制以晶界滑移机制为主. 因此, 细晶粒的晶界多, 滑移更加容易, 导致所获得的延伸率更高. 然而, 随着温度继续升高, α 2 晶粒尺寸并未增大, 980和1000 ℃的α 2 晶粒大小基本相当, 均约为4 μm, 3个温度的α 2 晶粒都小于940 ℃的(约15 μm). 这与Jobart等[15 ] 的结果恰好相反, 他发现随温度升高、应变增加, α 2 晶粒尺寸逐渐增大. 影响Ti3 Al合金超塑性的另外一个主要因素是相比例. 可见, 随着变形温度的升高, B2相含量逐渐增加, 与Fu等[5 ] 报道的一致. ...
1
2013
... 其中, Q为变形激活能, kJ/mol; R为气体常数. 式(5)右端可由 l n s i n h α σ - T - 1 α 2 合金的变形激活能(500 kJ/mol)低[5 ] . 对比其它钛合金和高温合金, 如: TC11的变形激活能为433.98 kJ/mol[16 ] , TC21合金变形激活能为540 kJ/mol[17 ] , γ -TiAl合金的变形激活能为413.53 kJ/mol[18 ] , GH625合金变形激活能为635.38 kJ/mol[19 ] , Ti2AlNb合金的变形激活能为238~327 kJ/mol[20 ] . 可见, TAC-1B合金具有更低的激活能, 这也表明TAC-1B合金具有更加优异的超塑变形性能. ...
1
2013
... 其中, Q为变形激活能, kJ/mol; R为气体常数. 式(5)右端可由 l n s i n h α σ - T - 1 α 2 合金的变形激活能(500 kJ/mol)低[5 ] . 对比其它钛合金和高温合金, 如: TC11的变形激活能为433.98 kJ/mol[16 ] , TC21合金变形激活能为540 kJ/mol[17 ] , γ -TiAl合金的变形激活能为413.53 kJ/mol[18 ] , GH625合金变形激活能为635.38 kJ/mol[19 ] , Ti2AlNb合金的变形激活能为238~327 kJ/mol[20 ] . 可见, TAC-1B合金具有更低的激活能, 这也表明TAC-1B合金具有更加优异的超塑变形性能. ...
1
2009
... 其中, Q为变形激活能, kJ/mol; R为气体常数. 式(5)右端可由 l n s i n h α σ - T - 1 α 2 合金的变形激活能(500 kJ/mol)低[5 ] . 对比其它钛合金和高温合金, 如: TC11的变形激活能为433.98 kJ/mol[16 ] , TC21合金变形激活能为540 kJ/mol[17 ] , γ -TiAl合金的变形激活能为413.53 kJ/mol[18 ] , GH625合金变形激活能为635.38 kJ/mol[19 ] , Ti2AlNb合金的变形激活能为238~327 kJ/mol[20 ] . 可见, TAC-1B合金具有更低的激活能, 这也表明TAC-1B合金具有更加优异的超塑变形性能. ...
1
2009
... 其中, Q为变形激活能, kJ/mol; R为气体常数. 式(5)右端可由 l n s i n h α σ - T - 1 α 2 合金的变形激活能(500 kJ/mol)低[5 ] . 对比其它钛合金和高温合金, 如: TC11的变形激活能为433.98 kJ/mol[16 ] , TC21合金变形激活能为540 kJ/mol[17 ] , γ -TiAl合金的变形激活能为413.53 kJ/mol[18 ] , GH625合金变形激活能为635.38 kJ/mol[19 ] , Ti2AlNb合金的变形激活能为238~327 kJ/mol[20 ] . 可见, TAC-1B合金具有更低的激活能, 这也表明TAC-1B合金具有更加优异的超塑变形性能. ...
1
2011
... 其中, Q为变形激活能, kJ/mol; R为气体常数. 式(5)右端可由 l n s i n h α σ - T - 1 α 2 合金的变形激活能(500 kJ/mol)低[5 ] . 对比其它钛合金和高温合金, 如: TC11的变形激活能为433.98 kJ/mol[16 ] , TC21合金变形激活能为540 kJ/mol[17 ] , γ -TiAl合金的变形激活能为413.53 kJ/mol[18 ] , GH625合金变形激活能为635.38 kJ/mol[19 ] , Ti2AlNb合金的变形激活能为238~327 kJ/mol[20 ] . 可见, TAC-1B合金具有更低的激活能, 这也表明TAC-1B合金具有更加优异的超塑变形性能. ...
1
2011
... 其中, Q为变形激活能, kJ/mol; R为气体常数. 式(5)右端可由 l n s i n h α σ - T - 1 α 2 合金的变形激活能(500 kJ/mol)低[5 ] . 对比其它钛合金和高温合金, 如: TC11的变形激活能为433.98 kJ/mol[16 ] , TC21合金变形激活能为540 kJ/mol[17 ] , γ -TiAl合金的变形激活能为413.53 kJ/mol[18 ] , GH625合金变形激活能为635.38 kJ/mol[19 ] , Ti2AlNb合金的变形激活能为238~327 kJ/mol[20 ] . 可见, TAC-1B合金具有更低的激活能, 这也表明TAC-1B合金具有更加优异的超塑变形性能. ...
2
2010
... 采用以下双曲正弦形Arrhenius方程描述TAC-1B合金的本构关系[1 ] [6 -19 ] : ...
... 其中, Q为变形激活能, kJ/mol; R为气体常数. 式(5)右端可由 l n s i n h α σ - T - 1 α 2 合金的变形激活能(500 kJ/mol)低[5 ] . 对比其它钛合金和高温合金, 如: TC11的变形激活能为433.98 kJ/mol[16 ] , TC21合金变形激活能为540 kJ/mol[17 ] , γ -TiAl合金的变形激活能为413.53 kJ/mol[18 ] , GH625合金变形激活能为635.38 kJ/mol[19 ] , Ti2AlNb合金的变形激活能为238~327 kJ/mol[20 ] . 可见, TAC-1B合金具有更低的激活能, 这也表明TAC-1B合金具有更加优异的超塑变形性能. ...
2
2010
... 采用以下双曲正弦形Arrhenius方程描述TAC-1B合金的本构关系[1 ] [6 -19 ] : ...
... 其中, Q为变形激活能, kJ/mol; R为气体常数. 式(5)右端可由 l n s i n h α σ - T - 1 α 2 合金的变形激活能(500 kJ/mol)低[5 ] . 对比其它钛合金和高温合金, 如: TC11的变形激活能为433.98 kJ/mol[16 ] , TC21合金变形激活能为540 kJ/mol[17 ] , γ -TiAl合金的变形激活能为413.53 kJ/mol[18 ] , GH625合金变形激活能为635.38 kJ/mol[19 ] , Ti2AlNb合金的变形激活能为238~327 kJ/mol[20 ] . 可见, TAC-1B合金具有更低的激活能, 这也表明TAC-1B合金具有更加优异的超塑变形性能. ...
1
2009
... 其中, Q为变形激活能, kJ/mol; R为气体常数. 式(5)右端可由 l n s i n h α σ - T - 1 α 2 合金的变形激活能(500 kJ/mol)低[5 ] . 对比其它钛合金和高温合金, 如: TC11的变形激活能为433.98 kJ/mol[16 ] , TC21合金变形激活能为540 kJ/mol[17 ] , γ -TiAl合金的变形激活能为413.53 kJ/mol[18 ] , GH625合金变形激活能为635.38 kJ/mol[19 ] , Ti2AlNb合金的变形激活能为238~327 kJ/mol[20 ] . 可见, TAC-1B合金具有更低的激活能, 这也表明TAC-1B合金具有更加优异的超塑变形性能. ...
1
2009
... 其中, Q为变形激活能, kJ/mol; R为气体常数. 式(5)右端可由 l n s i n h α σ - T - 1 α 2 合金的变形激活能(500 kJ/mol)低[5 ] . 对比其它钛合金和高温合金, 如: TC11的变形激活能为433.98 kJ/mol[16 ] , TC21合金变形激活能为540 kJ/mol[17 ] , γ -TiAl合金的变形激活能为413.53 kJ/mol[18 ] , GH625合金变形激活能为635.38 kJ/mol[19 ] , Ti2AlNb合金的变形激活能为238~327 kJ/mol[20 ] . 可见, TAC-1B合金具有更低的激活能, 这也表明TAC-1B合金具有更加优异的超塑变形性能. ...

 , 韩秀全
, 韩秀全
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}